Other Samplers
Trey V. Wenger (c) June 2025
Here we demonstrate the use of non-standard samplers with bayes_spec.
[1]:
# General imports
import matplotlib.pyplot as plt
import pandas as pd
import numpy as np
import pymc as pm
import pymc
print("pymc version:", pymc.__version__)
import bayes_spec
print("bayes_spec version:", bayes_spec.__version__)
# Notebook configuration
pd.options.display.max_rows = None
pymc version: 5.22.0
bayes_spec version: 1.7.9-staging+2.gb86248c.dirty
Data Format
[2]:
from bayes_spec import SpecData
# spectral axis definition
velocity_axis = np.linspace(-250.0, 250.0, 501) # km/s
# data noise can either be a scalar (assumed constant noise across the spectrum)
# or an array of the same length as the data
noise = 1.0 # K
# brightness data. In this case, we just throw in some random data for now
# since we are only doing this in order to simulate some actual data.
brightness_data = noise * np.random.randn(len(velocity_axis)) # K
# Our model only expects a single observation named "observation"
# Note that because we "named" the spectrum "observation" here,
# we must use the same name in the model definition above
observation = SpecData(
velocity_axis,
brightness_data,
noise,
xlabel=r"Velocity (km s$^{-1}$)",
ylabel="Brightness Temperature (K)",
)
dummy_data = {"observation": observation}
Simulating Data
[3]:
from bayes_spec.models import GaussNoiseModel
# Initialize and define the model
model = GaussNoiseModel(dummy_data, n_clouds=3, baseline_degree=2, seed=1234, verbose=True)
model.add_priors(
prior_line_area = 500.0, # mode of k=2 gamma distribution prior on line area (K km s-1)
prior_fwhm = 25.0, # mode of k=2 gamma distribution prior on FWHM line width (km s-1)
prior_velocity = [0.0, 50.0], # mean and width of normal distribution prior on centroid velocity (km s-1)
prior_baseline_coeffs = [1.0, 1.0, 1.0], # width of normal distribution prior on normalized baseline coefficients
prior_rms = 1.0, # width of half-normal distribution prior on spectral rms (K)
)
model.add_likelihood()
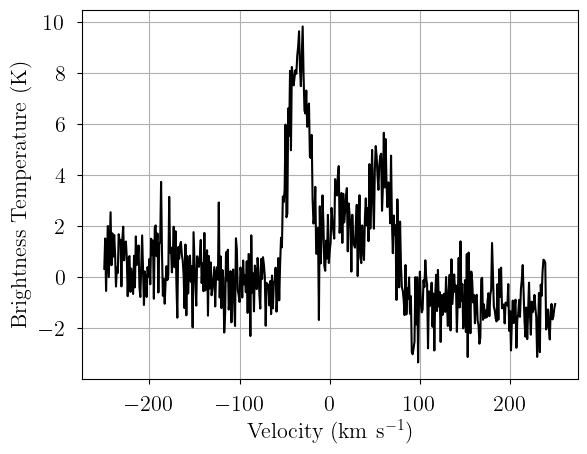
# Simulate observation
sim_brightness = model.model.observation.eval({
"fwhm": [25.0, 40.0, 35.0], # FWHM line width (km/s)
"line_area": [250.0, 125.0, 175.0], # line area (K km/s)
"velocity": [-35.0, 10.0, 55.0], # velocity (km/s)
"baseline_observation_norm": [-0.5, -2.0, 3.0], # normalized baseline coefficients
"rms_observation": noise, # spectral rms (K)
})
# Plot the simulated data
plt.plot(dummy_data["observation"].spectral, sim_brightness, 'k-')
plt.xlabel(dummy_data["observation"].xlabel)
_ = plt.ylabel(dummy_data["observation"].ylabel)
[4]:
# Now we pack the simulated spectrum into a new SpecData instance
observation = SpecData(
velocity_axis,
sim_brightness,
noise,
xlabel=r"Velocity (km s$^{-1}$)",
ylabel="Brightness Temperature (K)",
)
data = {"observation": observation}
MCMC
First, let’s revisit the NUTS sampler used in the other notebooks.
[5]:
model = GaussNoiseModel(data, n_clouds=3, baseline_degree=2, seed=123456, verbose=True)
model.add_priors(
prior_line_area = 200.0, # mode of k=2 gamma distribution prior on line area (K km s-1)
prior_fwhm = 30.0, # mode of k=2 gamma distribution prior on FWHM line width (km s-1)
prior_velocity = [0.0, 50.0], # mean and width of normal distribution prior on centroid velocity (km s-1)
prior_baseline_coeffs = [1.0, 1.0, 1.0], # width of normal distribution prior on normalized baseline coefficients
prior_rms = 2.0, # width of half-normal distribution prior on spectral rms (K)
)
model.add_likelihood()
Let’s try the pymc "auto" initialization.
[6]:
model.sample(
init = "auto",
tune = 1000,
draws = 1000,
chains = 4,
cores = 4,
)
Initializing NUTS using jitter+adapt_diag...
Multiprocess sampling (4 chains in 4 jobs)
NUTS: [baseline_observation_norm, line_area_norm, fwhm_norm, velocity_norm, rms_observation_norm]
Sampling 4 chains for 1_000 tune and 1_000 draw iterations (4_000 + 4_000 draws total) took 3 seconds.
Adding log-likelihood to trace
[7]:
model.solve()
GMM converged to unique solution
Label order mismatch in solution 0
Chain 0 order: [2 1 0]
Chain 1 order: [2 1 0]
Chain 2 order: [2 0 1]
Chain 3 order: [2 1 0]
Adopting (first) most common order: [2 1 0]
[8]:
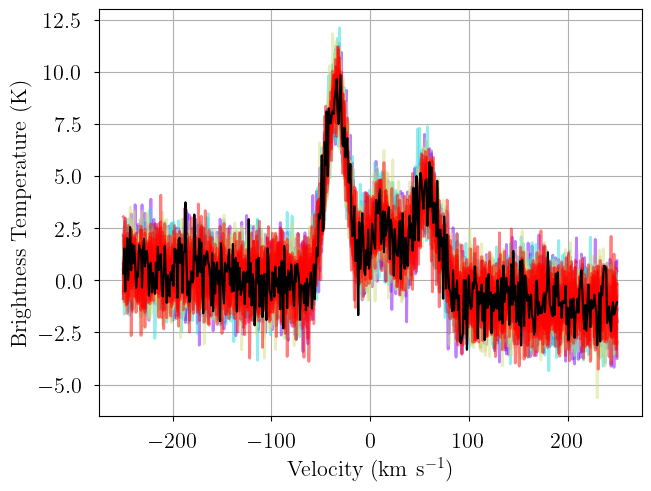
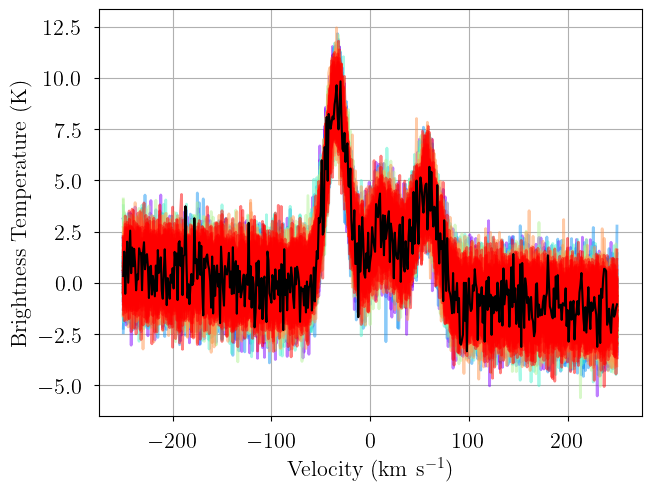
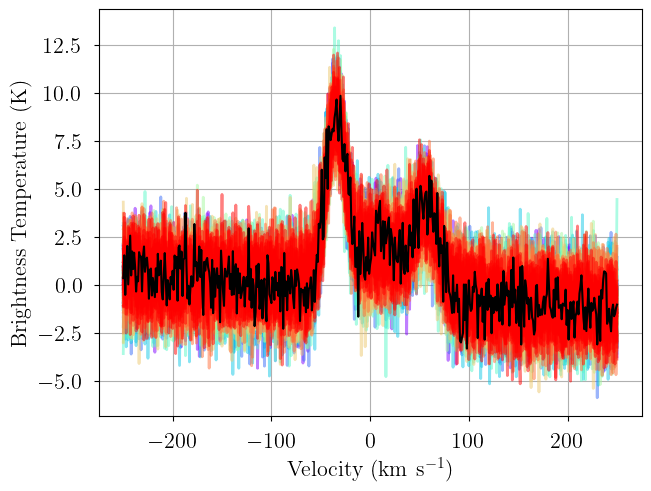
from bayes_spec.plots import plot_predictive
posterior = model.sample_posterior_predictive(
thin=100, # keep one in {thin} posterior samples
)
_ = plot_predictive(model.data, posterior.posterior_predictive)
Sampling: [observation]
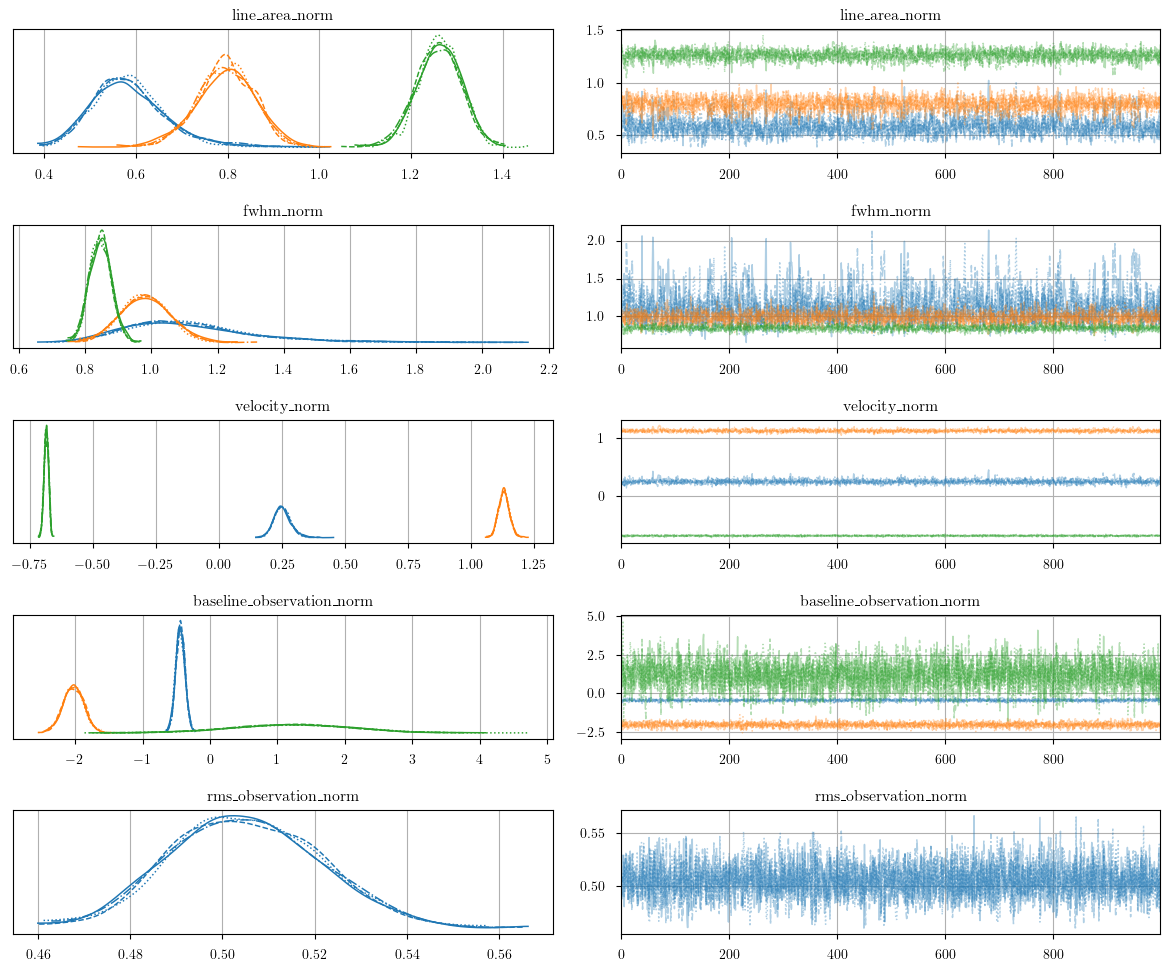
[9]:
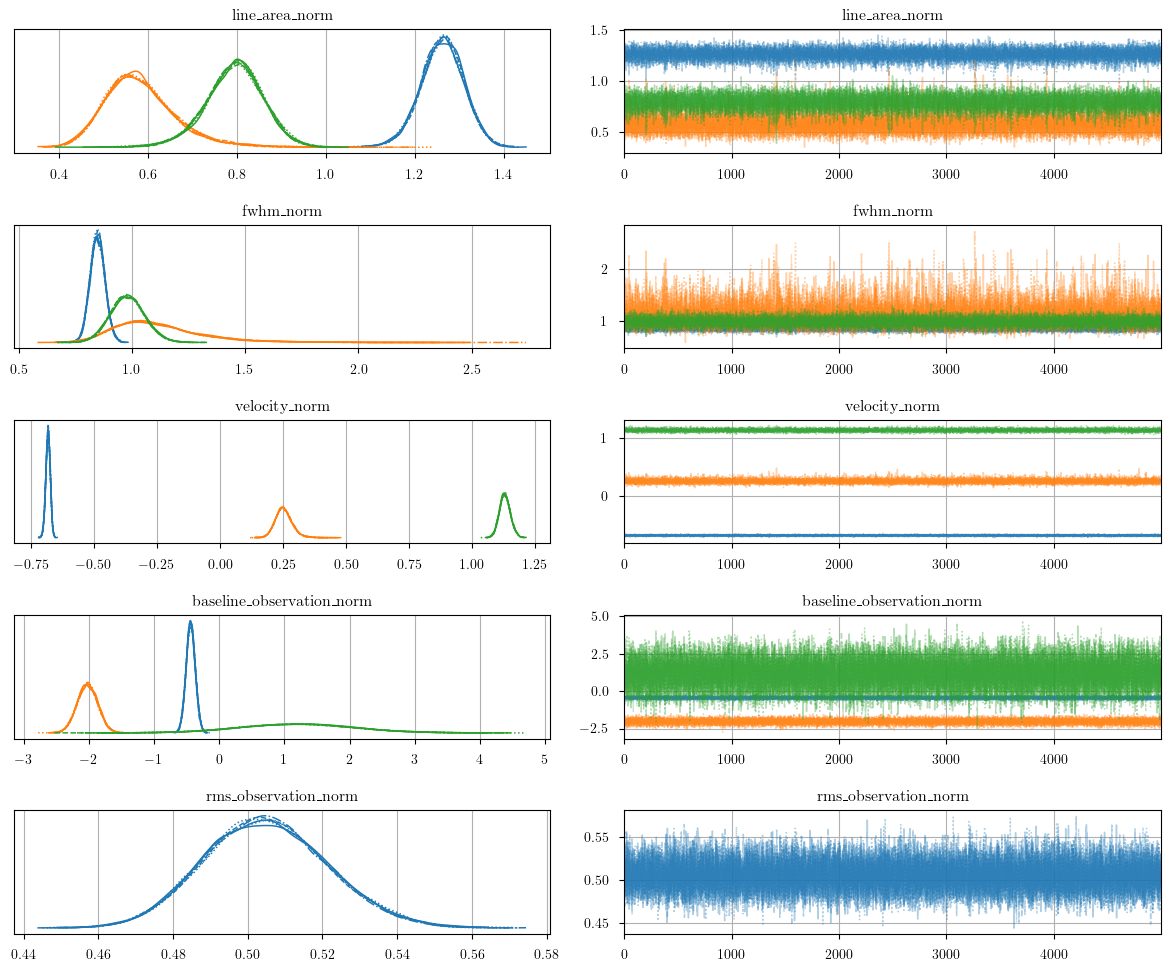
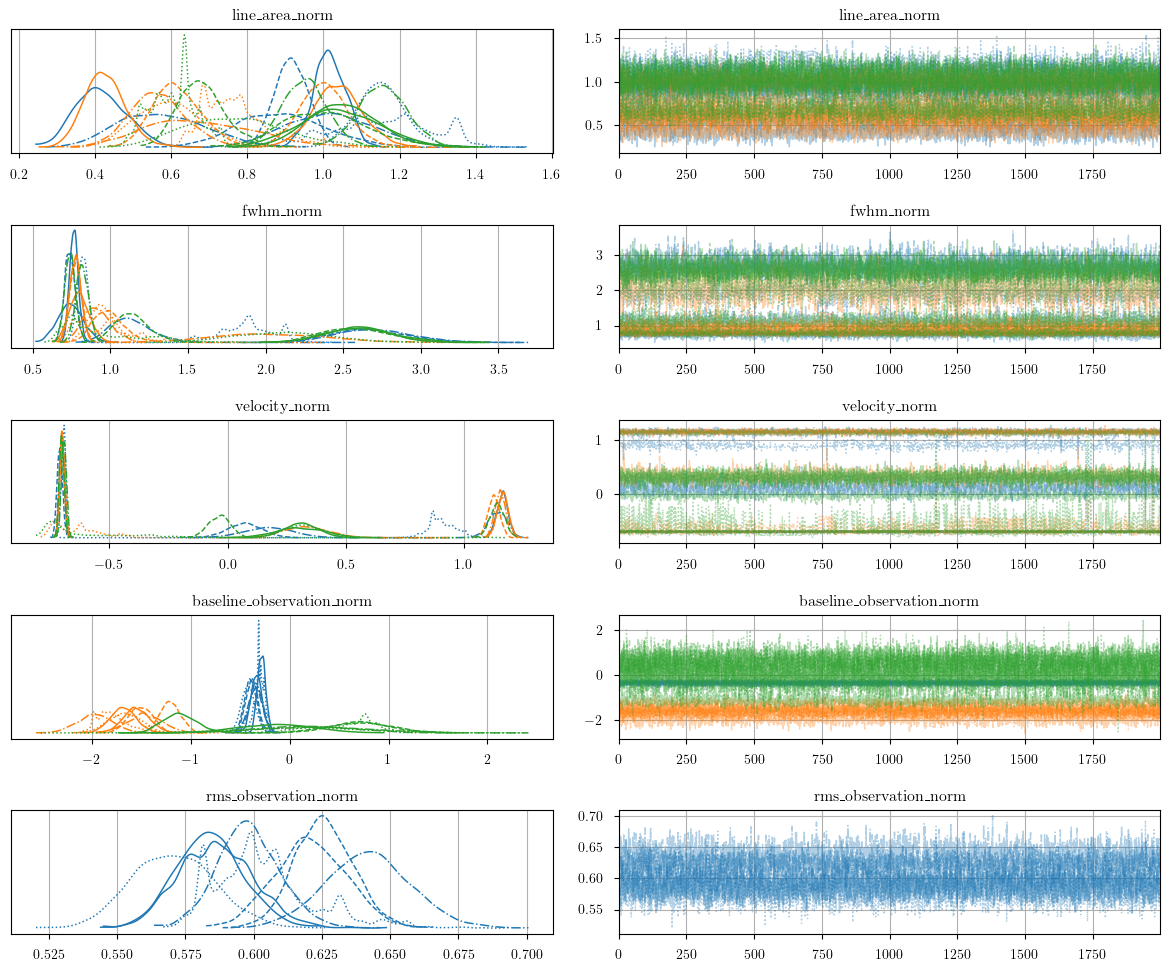
from bayes_spec.plots import plot_traces
axes = plot_traces(model.trace.solution_0, model.cloud_freeRVs + model.baseline_freeRVs + model.hyper_freeRVs)
fig = axes.ravel()[0].figure
fig.tight_layout()
[10]:
pm.summary(model.trace.solution_0)
[10]:
| mean | sd | hdi_3% | hdi_97% | mcse_mean | mcse_sd | ess_bulk | ess_tail | r_hat | |
|---|---|---|---|---|---|---|---|---|---|
| baseline_observation_norm[0] | -0.441 | 0.068 | -0.566 | -0.308 | 0.001 | 0.001 | 2954.0 | 2388.0 | 1.0 |
| baseline_observation_norm[1] | -2.027 | 0.152 | -2.294 | -1.717 | 0.002 | 0.002 | 4817.0 | 3064.0 | 1.0 |
| baseline_observation_norm[2] | 1.214 | 0.873 | -0.514 | 2.761 | 0.016 | 0.013 | 2965.0 | 2633.0 | 1.0 |
| velocity_norm[0] | 0.253 | 0.034 | 0.194 | 0.321 | 0.001 | 0.001 | 2975.0 | 2429.0 | 1.0 |
| velocity_norm[1] | 1.131 | 0.022 | 1.092 | 1.172 | 0.000 | 0.000 | 2115.0 | 2228.0 | 1.0 |
| velocity_norm[2] | -0.683 | 0.009 | -0.699 | -0.667 | 0.000 | 0.000 | 3087.0 | 2496.0 | 1.0 |
| line_area_norm[0] | 0.585 | 0.081 | 0.434 | 0.730 | 0.002 | 0.002 | 1696.0 | 1570.0 | 1.0 |
| line_area_norm[1] | 0.795 | 0.063 | 0.677 | 0.913 | 0.001 | 0.001 | 1844.0 | 1580.0 | 1.0 |
| line_area_norm[2] | 1.260 | 0.048 | 1.176 | 1.355 | 0.001 | 0.001 | 2524.0 | 2116.0 | 1.0 |
| fwhm_norm[0] | 1.120 | 0.200 | 0.792 | 1.493 | 0.005 | 0.005 | 1674.0 | 1528.0 | 1.0 |
| fwhm_norm[1] | 0.982 | 0.074 | 0.853 | 1.133 | 0.002 | 0.001 | 2137.0 | 2259.0 | 1.0 |
| fwhm_norm[2] | 0.846 | 0.033 | 0.791 | 0.913 | 0.001 | 0.000 | 2733.0 | 2667.0 | 1.0 |
| rms_observation_norm | 0.505 | 0.016 | 0.475 | 0.535 | 0.000 | 0.000 | 4654.0 | 2836.0 | 1.0 |
| line_area[0] | 116.937 | 16.181 | 86.815 | 145.985 | 0.408 | 0.375 | 1696.0 | 1570.0 | 1.0 |
| line_area[1] | 158.974 | 12.664 | 135.344 | 182.514 | 0.300 | 0.232 | 1844.0 | 1580.0 | 1.0 |
| line_area[2] | 252.075 | 9.636 | 235.106 | 270.978 | 0.194 | 0.158 | 2524.0 | 2116.0 | 1.0 |
| fwhm[0] | 33.598 | 6.015 | 23.773 | 44.794 | 0.157 | 0.152 | 1674.0 | 1528.0 | 1.0 |
| fwhm[1] | 29.455 | 2.229 | 25.590 | 33.985 | 0.048 | 0.033 | 2137.0 | 2259.0 | 1.0 |
| fwhm[2] | 25.393 | 0.980 | 23.715 | 27.383 | 0.019 | 0.014 | 2733.0 | 2667.0 | 1.0 |
| velocity[0] | 12.640 | 1.695 | 9.714 | 16.052 | 0.032 | 0.032 | 2975.0 | 2429.0 | 1.0 |
| velocity[1] | 56.541 | 1.079 | 54.593 | 58.579 | 0.024 | 0.018 | 2115.0 | 2228.0 | 1.0 |
| velocity[2] | -34.166 | 0.442 | -34.949 | -33.335 | 0.008 | 0.007 | 3087.0 | 2496.0 | 1.0 |
| amplitude[0] | 3.301 | 0.290 | 2.754 | 3.852 | 0.005 | 0.004 | 2814.0 | 3138.0 | 1.0 |
| amplitude[1] | 5.076 | 0.273 | 4.545 | 5.575 | 0.005 | 0.004 | 3572.0 | 3360.0 | 1.0 |
| amplitude[2] | 9.330 | 0.286 | 8.776 | 9.856 | 0.004 | 0.005 | 5522.0 | 3223.0 | 1.0 |
| rms_observation | 1.010 | 0.032 | 0.951 | 1.070 | 0.000 | 0.000 | 4654.0 | 2836.0 | 1.0 |
nutpie
nutpie is a NUTS sampler written in RUST that runs on the CPU. It’s much faster than the default pymc implementation, but there is less control over its initialization (i.e., we can’t initialize it using variational inference).
[11]:
model.sample(
init = "auto", # must use "auto" initialization for nutpie
tune = 5000, # tuning samples
draws = 5000, # posterior samples
chains = 6, # number of independent chains
cores = 6, # number of parallel chains
nuts_sampler = "nutpie",
)
Sampler Progress
Total Chains: 6
Active Chains: 0
Finished Chains: 6
Sampling for now
Estimated Time to Completion: now
| Progress | Draws | Divergences | Step Size | Gradients/Draw |
|---|---|---|---|---|
| 10000 | 0 | 0.58 | 15 | |
| 10000 | 0 | 0.60 | 7 | |
| 10000 | 0 | 0.58 | 15 | |
| 10000 | 0 | 0.62 | 7 | |
| 10000 | 0 | 0.62 | 7 | |
| 10000 | 0 | 0.56 | 7 |
Adding log-likelihood to trace
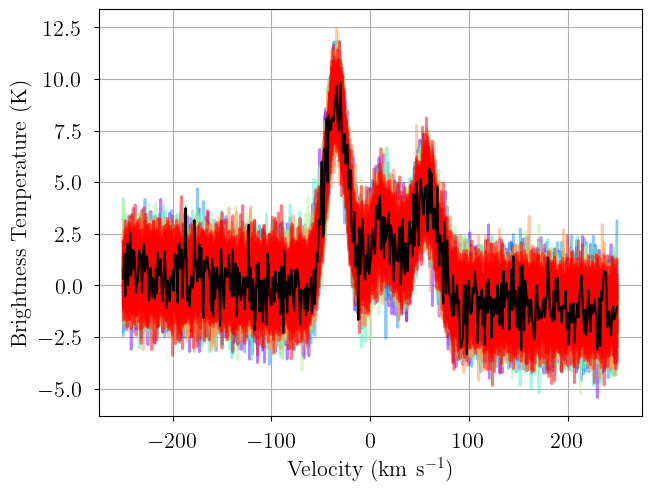
After a brief delay while the model is compiled, the sampling begins. Note the speed!
[12]:
model.solve()
GMM converged to unique solution
Label order mismatch in solution 0
Chain 0 order: [0 2 1]
Chain 1 order: [0 1 2]
Chain 2 order: [0 2 1]
Chain 3 order: [0 2 1]
Chain 4 order: [2 1 0]
Chain 5 order: [1 2 0]
Adopting (first) most common order: [0 2 1]
[13]:
posterior = model.sample_posterior_predictive(
thin=100, # keep one in {thin} posterior samples
)
_ = plot_predictive(model.data, posterior.posterior_predictive)
Sampling: [observation]
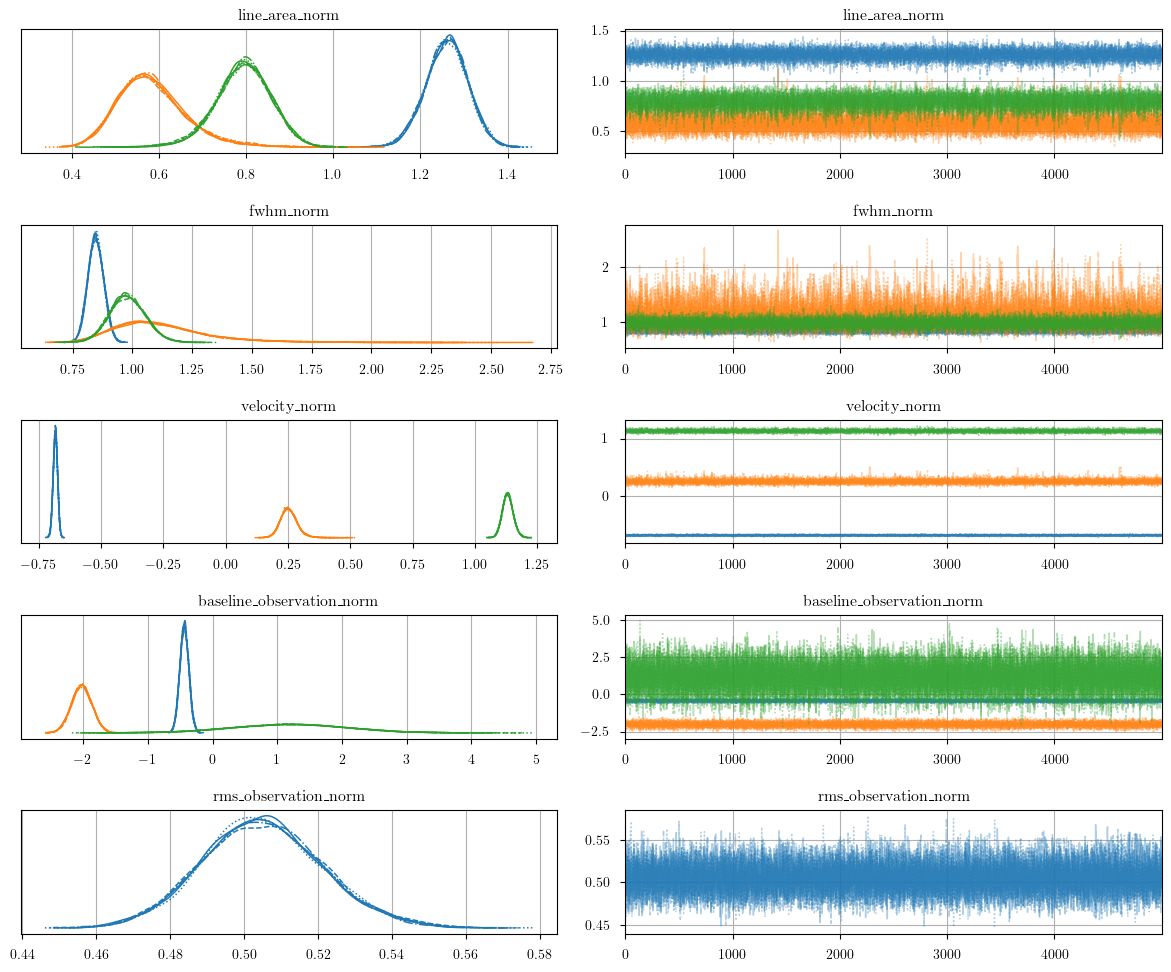
[14]:
axes = plot_traces(model.trace.solution_0, model.cloud_freeRVs + model.baseline_freeRVs + model.hyper_freeRVs)
fig = axes.ravel()[0].figure
fig.tight_layout()

[15]:
pm.summary(model.trace.solution_0)
[15]:
| mean | sd | hdi_3% | hdi_97% | mcse_mean | mcse_sd | ess_bulk | ess_tail | r_hat | |
|---|---|---|---|---|---|---|---|---|---|
| baseline_observation_norm[0] | -0.438 | 0.070 | -0.569 | -0.306 | 0.000 | 0.000 | 23206.0 | 23015.0 | 1.00 |
| baseline_observation_norm[1] | -2.025 | 0.156 | -2.320 | -1.735 | 0.001 | 0.001 | 49046.0 | 21140.0 | 1.00 |
| baseline_observation_norm[2] | 1.188 | 0.871 | -0.434 | 2.853 | 0.005 | 0.004 | 27161.0 | 24841.0 | 1.00 |
| line_area_norm_log__[0] | 0.024 | 0.313 | -0.605 | 0.315 | 0.125 | 0.070 | 9.0 | 24.0 | 1.73 |
| line_area_norm_log__[1] | -0.442 | 0.190 | -0.746 | -0.116 | 0.060 | 0.010 | 12.0 | 91.0 | 1.45 |
| line_area_norm_log__[2] | -0.133 | 0.291 | -0.612 | 0.303 | 0.114 | 0.049 | 8.0 | 25.0 | 2.16 |
| fwhm_norm_log__[0] | -0.098 | 0.133 | -0.265 | 0.165 | 0.043 | 0.034 | 11.0 | 25.0 | 1.48 |
| fwhm_norm_log__[1] | 0.060 | 0.159 | -0.212 | 0.371 | 0.024 | 0.008 | 49.0 | 536.0 | 1.08 |
| fwhm_norm_log__[2] | -0.051 | 0.131 | -0.248 | 0.176 | 0.039 | 0.024 | 11.0 | 27.0 | 1.50 |
| velocity_norm[0] | -0.683 | 0.009 | -0.700 | -0.667 | 0.000 | 0.000 | 22388.0 | 18708.0 | 1.00 |
| velocity_norm[1] | 0.253 | 0.034 | 0.190 | 0.316 | 0.000 | 0.000 | 17982.0 | 15221.0 | 1.00 |
| velocity_norm[2] | 1.131 | 0.022 | 1.090 | 1.171 | 0.000 | 0.000 | 12257.0 | 13894.0 | 1.00 |
| rms_observation_norm_log__ | -0.684 | 0.032 | -0.743 | -0.623 | 0.000 | 0.000 | 47781.0 | 22801.0 | 1.00 |
| line_area_norm[0] | 1.260 | 0.049 | 1.167 | 1.349 | 0.000 | 0.000 | 15170.0 | 14901.0 | 1.00 |
| line_area_norm[1] | 0.586 | 0.082 | 0.438 | 0.734 | 0.001 | 0.001 | 9737.0 | 8946.0 | 1.00 |
| line_area_norm[2] | 0.792 | 0.065 | 0.672 | 0.918 | 0.001 | 0.001 | 10260.0 | 9505.0 | 1.00 |
| fwhm_norm[0] | 0.847 | 0.033 | 0.785 | 0.908 | 0.000 | 0.000 | 18243.0 | 19714.0 | 1.00 |
| fwhm_norm[1] | 1.125 | 0.206 | 0.783 | 1.499 | 0.002 | 0.003 | 9106.0 | 8991.0 | 1.00 |
| fwhm_norm[2] | 0.979 | 0.076 | 0.831 | 1.115 | 0.001 | 0.000 | 11937.0 | 14139.0 | 1.00 |
| rms_observation_norm | 0.505 | 0.016 | 0.475 | 0.536 | 0.000 | 0.000 | 47781.0 | 22801.0 | 1.00 |
| line_area[0] | 251.977 | 9.751 | 233.361 | 269.866 | 0.080 | 0.063 | 15170.0 | 14901.0 | 1.00 |
| line_area[1] | 117.162 | 16.403 | 87.501 | 146.850 | 0.178 | 0.194 | 9737.0 | 8946.0 | 1.00 |
| line_area[2] | 158.425 | 13.020 | 134.338 | 183.514 | 0.132 | 0.112 | 10260.0 | 9505.0 | 1.00 |
| fwhm[0] | 25.402 | 0.979 | 23.558 | 27.248 | 0.007 | 0.005 | 18243.0 | 19714.0 | 1.00 |
| fwhm[1] | 33.742 | 6.176 | 23.502 | 44.974 | 0.070 | 0.084 | 9106.0 | 8991.0 | 1.00 |
| fwhm[2] | 29.360 | 2.269 | 24.937 | 33.436 | 0.021 | 0.013 | 11937.0 | 14139.0 | 1.00 |
| velocity[0] | -34.168 | 0.438 | -34.981 | -33.338 | 0.003 | 0.002 | 22388.0 | 18708.0 | 1.00 |
| velocity[1] | 12.664 | 1.687 | 9.516 | 15.820 | 0.013 | 0.014 | 17982.0 | 15221.0 | 1.00 |
| velocity[2] | 56.566 | 1.081 | 54.476 | 58.546 | 0.010 | 0.006 | 12257.0 | 13894.0 | 1.00 |
| amplitude[0] | 9.323 | 0.286 | 8.788 | 9.862 | 0.001 | 0.002 | 37003.0 | 23652.0 | 1.00 |
| amplitude[1] | 3.295 | 0.292 | 2.759 | 3.857 | 0.002 | 0.001 | 18766.0 | 19488.0 | 1.00 |
| amplitude[2] | 5.075 | 0.281 | 4.551 | 5.602 | 0.002 | 0.002 | 27040.0 | 20026.0 | 1.00 |
| rms_observation | 1.010 | 0.032 | 0.951 | 1.072 | 0.000 | 0.000 | 47781.0 | 22801.0 | 1.00 |
numpyro
numpyro is a JAX-based NUTS sampler, and it can run on the GPU. bayes_spec provides installation options to suport CUDA GPUs (i.e., nvidia). GPUs aren’t usually the way to go, unless you have a lot of them! Otherwise, you’ll have to run each chain sequentially. Let’s stick to the CPU.
[16]:
import jax
jax.config.update('jax_platform_name', 'cpu')
import numpyro
numpyro.set_platform('cpu')
numpyro.set_host_device_count(6)
[17]:
model.sample(
init = "auto", # must use "auto" initialization for nutpie
tune = 5000, # tuning samples
draws = 5000, # posterior samples
chains = 6, # number of independent chains
cores = 6, # number of parallel chains
nuts_sampler = "numpyro",
)
Adding log-likelihood to trace
[18]:
model.solve()
GMM converged to unique solution
Label order mismatch in solution 0
Chain 0 order: [0 1 2]
Chain 1 order: [2 1 0]
Chain 2 order: [2 0 1]
Chain 3 order: [2 0 1]
Chain 4 order: [1 2 0]
Chain 5 order: [0 1 2]
Adopting (first) most common order: [0 1 2]
[19]:
posterior = model.sample_posterior_predictive(
thin=100, # keep one in {thin} posterior samples
)
_ = plot_predictive(model.data, posterior.posterior_predictive)
Sampling: [observation]
[20]:
axes = plot_traces(model.trace.solution_0, model.cloud_freeRVs + model.baseline_freeRVs + model.hyper_freeRVs)
fig = axes.ravel()[0].figure
fig.tight_layout()
[21]:
pm.summary(model.trace.solution_0)
[21]:
| mean | sd | hdi_3% | hdi_97% | mcse_mean | mcse_sd | ess_bulk | ess_tail | r_hat | |
|---|---|---|---|---|---|---|---|---|---|
| baseline_observation_norm[0] | -0.439 | 0.070 | -0.568 | -0.304 | 0.000 | 0.000 | 19769.0 | 21241.0 | 1.0 |
| baseline_observation_norm[1] | -2.025 | 0.156 | -2.318 | -1.736 | 0.001 | 0.001 | 28117.0 | 20376.0 | 1.0 |
| baseline_observation_norm[2] | 1.189 | 0.869 | -0.407 | 2.868 | 0.006 | 0.005 | 22045.0 | 22437.0 | 1.0 |
| velocity_norm[0] | -0.683 | 0.009 | -0.700 | -0.667 | 0.000 | 0.000 | 19248.0 | 19153.0 | 1.0 |
| velocity_norm[1] | 0.253 | 0.033 | 0.192 | 0.316 | 0.000 | 0.000 | 16331.0 | 14794.0 | 1.0 |
| velocity_norm[2] | 1.131 | 0.022 | 1.091 | 1.172 | 0.000 | 0.000 | 12380.0 | 14111.0 | 1.0 |
| line_area_norm[0] | 1.261 | 0.049 | 1.170 | 1.352 | 0.000 | 0.000 | 13992.0 | 14365.0 | 1.0 |
| line_area_norm[1] | 0.583 | 0.081 | 0.443 | 0.736 | 0.001 | 0.001 | 10151.0 | 10993.0 | 1.0 |
| line_area_norm[2] | 0.794 | 0.065 | 0.674 | 0.919 | 0.001 | 0.001 | 11257.0 | 11237.0 | 1.0 |
| fwhm_norm[0] | 0.847 | 0.033 | 0.787 | 0.909 | 0.000 | 0.000 | 15403.0 | 18178.0 | 1.0 |
| fwhm_norm[1] | 1.117 | 0.204 | 0.786 | 1.497 | 0.002 | 0.003 | 9782.0 | 10033.0 | 1.0 |
| fwhm_norm[2] | 0.981 | 0.076 | 0.833 | 1.118 | 0.001 | 0.000 | 11964.0 | 14289.0 | 1.0 |
| rms_observation_norm | 0.505 | 0.017 | 0.475 | 0.536 | 0.000 | 0.000 | 26441.0 | 20471.0 | 1.0 |
| line_area[0] | 252.139 | 9.733 | 233.968 | 270.405 | 0.084 | 0.068 | 13992.0 | 14365.0 | 1.0 |
| line_area[1] | 116.670 | 16.253 | 88.563 | 147.221 | 0.169 | 0.169 | 10151.0 | 10993.0 | 1.0 |
| line_area[2] | 158.803 | 13.028 | 134.718 | 183.767 | 0.126 | 0.107 | 11257.0 | 11237.0 | 1.0 |
| fwhm[0] | 25.420 | 0.979 | 23.609 | 27.277 | 0.008 | 0.006 | 15403.0 | 18178.0 | 1.0 |
| fwhm[1] | 33.508 | 6.120 | 23.581 | 44.897 | 0.067 | 0.077 | 9782.0 | 10033.0 | 1.0 |
| fwhm[2] | 29.415 | 2.271 | 25.005 | 33.553 | 0.021 | 0.014 | 11964.0 | 14289.0 | 1.0 |
| velocity[0] | -34.159 | 0.439 | -34.980 | -33.331 | 0.003 | 0.002 | 19248.0 | 19153.0 | 1.0 |
| velocity[1] | 12.640 | 1.670 | 9.591 | 15.787 | 0.014 | 0.014 | 16331.0 | 14794.0 | 1.0 |
| velocity[2] | 56.539 | 1.076 | 54.565 | 58.616 | 0.010 | 0.006 | 12380.0 | 14111.0 | 1.0 |
| amplitude[0] | 9.323 | 0.288 | 8.765 | 9.852 | 0.001 | 0.002 | 39171.0 | 21862.0 | 1.0 |
| amplitude[1] | 3.304 | 0.295 | 2.758 | 3.867 | 0.002 | 0.002 | 21042.0 | 19773.0 | 1.0 |
| amplitude[2] | 5.077 | 0.280 | 4.570 | 5.613 | 0.002 | 0.002 | 31435.0 | 18735.0 | 1.0 |
| rms_observation | 1.010 | 0.033 | 0.950 | 1.073 | 0.000 | 0.000 | 26441.0 | 20471.0 | 1.0 |
blackjax
blackjax is another JAX-based NUTS sampler, similar to numpyro. It can also be run on the GPU.
[22]:
model.sample(
init = "auto", # must use "auto" initialization for nutpie
tune = 5000, # tuning samples
draws = 5000, # posterior samples
chains = 6, # number of independent chains
cores = 6, # number of parallel chains
nuts_sampler = "blackjax",
)
Running window adaptation
Adding log-likelihood to trace
[23]:
model.solve()
GMM converged to unique solution
Label order mismatch in solution 0
Chain 0 order: [0 2 1]
Chain 1 order: [1 2 0]
Chain 2 order: [1 2 0]
Chain 3 order: [1 0 2]
Chain 4 order: [2 1 0]
Chain 5 order: [0 2 1]
Adopting (first) most common order: [0 2 1]
[24]:
posterior = model.sample_posterior_predictive(
thin=100, # keep one in {thin} posterior samples
)
_ = plot_predictive(model.data, posterior.posterior_predictive)
Sampling: [observation]
[25]:
axes = plot_traces(model.trace.solution_0, model.cloud_freeRVs + model.baseline_freeRVs + model.hyper_freeRVs)
fig = axes.ravel()[0].figure
fig.tight_layout()
[26]:
pm.summary(model.trace.solution_0)
[26]:
| mean | sd | hdi_3% | hdi_97% | mcse_mean | mcse_sd | ess_bulk | ess_tail | r_hat | |
|---|---|---|---|---|---|---|---|---|---|
| baseline_observation_norm[0] | -0.438 | 0.070 | -0.570 | -0.306 | 0.000 | 0.000 | 19431.0 | 21016.0 | 1.0 |
| baseline_observation_norm[1] | -2.025 | 0.156 | -2.313 | -1.727 | 0.001 | 0.001 | 26610.0 | 22286.0 | 1.0 |
| baseline_observation_norm[2] | 1.187 | 0.879 | -0.535 | 2.754 | 0.006 | 0.005 | 21058.0 | 21672.0 | 1.0 |
| velocity_norm[0] | -0.683 | 0.009 | -0.700 | -0.667 | 0.000 | 0.000 | 19225.0 | 19349.0 | 1.0 |
| velocity_norm[1] | 0.253 | 0.034 | 0.192 | 0.317 | 0.000 | 0.000 | 17131.0 | 13647.0 | 1.0 |
| velocity_norm[2] | 1.131 | 0.021 | 1.090 | 1.171 | 0.000 | 0.000 | 12979.0 | 14056.0 | 1.0 |
| line_area_norm[0] | 1.260 | 0.049 | 1.166 | 1.348 | 0.000 | 0.000 | 13993.0 | 15127.0 | 1.0 |
| line_area_norm[1] | 0.585 | 0.081 | 0.436 | 0.731 | 0.001 | 0.001 | 9975.0 | 10211.0 | 1.0 |
| line_area_norm[2] | 0.793 | 0.065 | 0.670 | 0.912 | 0.001 | 0.001 | 10778.0 | 10217.0 | 1.0 |
| fwhm_norm[0] | 0.847 | 0.033 | 0.785 | 0.908 | 0.000 | 0.000 | 15920.0 | 18707.0 | 1.0 |
| fwhm_norm[1] | 1.122 | 0.205 | 0.781 | 1.494 | 0.002 | 0.003 | 9733.0 | 9657.0 | 1.0 |
| fwhm_norm[2] | 0.980 | 0.075 | 0.836 | 1.119 | 0.001 | 0.000 | 12591.0 | 15072.0 | 1.0 |
| rms_observation_norm | 0.505 | 0.016 | 0.476 | 0.537 | 0.000 | 0.000 | 25937.0 | 20145.0 | 1.0 |
| line_area[0] | 252.015 | 9.739 | 233.123 | 269.595 | 0.083 | 0.064 | 13993.0 | 15127.0 | 1.0 |
| line_area[1] | 117.074 | 16.259 | 87.250 | 146.172 | 0.173 | 0.184 | 9975.0 | 10211.0 | 1.0 |
| line_area[2] | 158.621 | 12.965 | 134.064 | 182.414 | 0.130 | 0.125 | 10778.0 | 10217.0 | 1.0 |
| fwhm[0] | 25.400 | 0.981 | 23.565 | 27.234 | 0.008 | 0.005 | 15920.0 | 18707.0 | 1.0 |
| fwhm[1] | 33.668 | 6.145 | 23.428 | 44.829 | 0.068 | 0.083 | 9733.0 | 9657.0 | 1.0 |
| fwhm[2] | 29.389 | 2.260 | 25.090 | 33.559 | 0.020 | 0.014 | 12591.0 | 15072.0 | 1.0 |
| velocity[0] | -34.170 | 0.438 | -34.981 | -33.338 | 0.003 | 0.002 | 19225.0 | 19349.0 | 1.0 |
| velocity[1] | 12.652 | 1.700 | 9.580 | 15.871 | 0.014 | 0.018 | 17131.0 | 13647.0 | 1.0 |
| velocity[2] | 56.557 | 1.070 | 54.524 | 58.556 | 0.009 | 0.007 | 12979.0 | 14056.0 | 1.0 |
| amplitude[0] | 9.325 | 0.286 | 8.786 | 9.859 | 0.001 | 0.002 | 41402.0 | 23718.0 | 1.0 |
| amplitude[1] | 3.299 | 0.293 | 2.728 | 3.832 | 0.002 | 0.002 | 19907.0 | 18897.0 | 1.0 |
| amplitude[2] | 5.076 | 0.283 | 4.553 | 5.608 | 0.002 | 0.002 | 27948.0 | 16945.0 | 1.0 |
| rms_observation | 1.010 | 0.033 | 0.951 | 1.075 | 0.000 | 0.000 | 25937.0 | 20145.0 | 1.0 |
Sequential Monte Carlo
Sequential Monte Carlo is a sampling strategy that overcomes the issues of multi-modal posterior distributions. In this case, where our model is a simple mixture of Gaussians, our posterior is highly multi-modal: chains could “collapse” to a single mode, and there is also the labeling degeneracy. We did not encounter any problems with the default MCMC sampling methods described in the other notebooks, primarily because we initialized the sampler using strong constraints from the variational inference initialization.
SMC has two hyperparameters: draws, the number of posterior draws (per stage), and threshold, which controls the tempering process between stages. Increasing these parameters will help with sampling from complicated models.
[27]:
model.sample_smc(
draws = 2_000, # posterior samples
chains = 8, # number of independent chains
cores = 8,
threshold = 0.75, # increase threshold from default (0.5)
)
Initializing SMC sampler...
Sampling 8 chains in 8 jobs
/home/twenger/miniforge3/envs/bayes_spec-dev/lib/python3.13/multiprocessing/popen_fork.py:67: RuntimeWarning: os.fork() was called. os.fork() is incompatible with multithreaded code, and JAX is multithreaded, so this will likely lead to a deadlock. self.pid = os.fork()
Adding log-likelihood to trace
[28]:
model.solve()
No solution found!
0 of 8 chains appear converged.
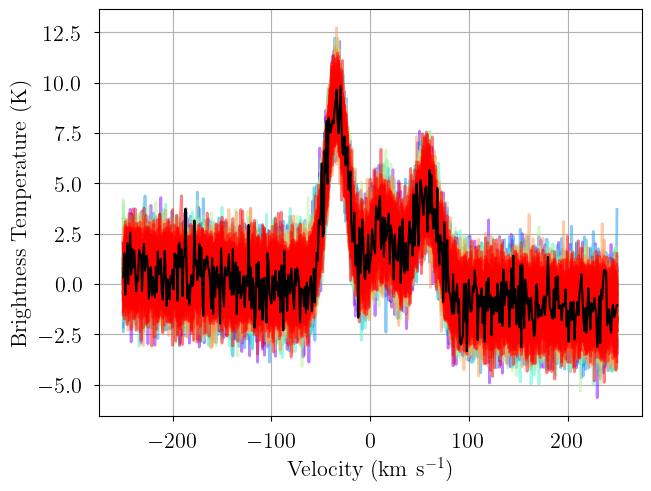
Something doesn’t look right! Let’s investigate by looking at the posterior predictive samples and the trace.
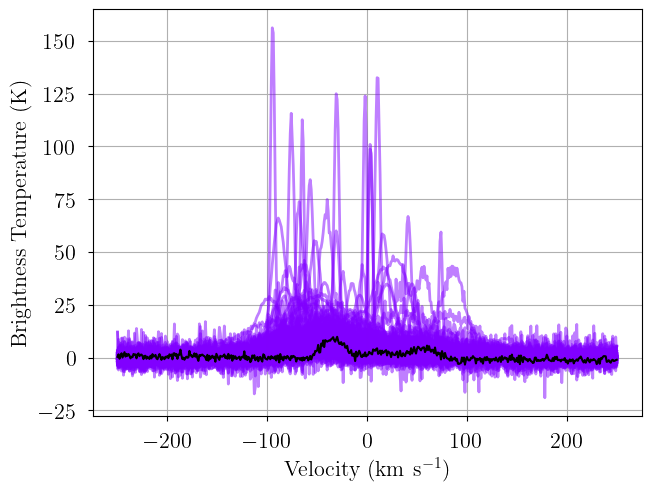
[29]:
posterior = model.sample_posterior_predictive(
thin=100, # keep one in {thin} posterior samples
)
_ = plot_predictive(model.data, posterior.posterior_predictive)
Sampling: [observation]
[30]:
axes = plot_traces(model.trace.posterior, model.cloud_freeRVs + model.baseline_freeRVs + model.hyper_freeRVs)
fig = axes.ravel()[0].figure
fig.tight_layout()
The model has clearly not converged. The issue is actually quite subtle: due to the labeling degeneracy (i.e., the order of the clouds doesn’t matter for this model), a single chain may re-order the clouds while sampling, thus causing the assumptions of SMC to break down. For this model, we can overcome this problem by enforcing an order on the clouds. The model GaussNoiseModel has an option to do just this: add_priors(ordered=True). Note that this changes the definition of the prior
distribution on velocity. The clouds are ordered by increasing velocity, thus breaking the labeling degeneracy. Note that this only works here because our model does not intrinsically depend on the order of the clouds. This is generally true for optically thin emission, but not necessarily true if there is optically thick emission (i.e., self-absorption).
[31]:
model = GaussNoiseModel(data, n_clouds=3, baseline_degree=2, seed=123456, verbose=True)
model.add_priors(
prior_line_area = 200.0, # mode of k=2 gamma distribution prior on line area (K km s-1)
prior_fwhm = 30.0, # mode of k=2 gamma distribution prior on FWHM line width (km s-1)
prior_velocity = [-100.0, 20.0], # lower limit and mode of k=2 gamma distribution on velocity OFFSET between clouds (km s-1)
prior_baseline_coeffs = [1.0, 1.0, 1.0], # width of normal distribution prior on normalized baseline coefficients
prior_rms = 2.0, # width of half-normal distribution prior on spectral rms (K)
ordered = True, # enforce ordered velocities
)
model.add_likelihood()
[32]:
# prior predictive check
prior = model.sample_prior_predictive(
samples=100, # prior predictive samples
)
_ = plot_predictive(model.data, prior.prior_predictive)
Sampling: [baseline_observation_norm, fwhm_norm, line_area_norm, observation, rms_observation_norm, velocity_norm]
[33]:
model.sample_smc(
draws = 2_000, # posterior samples
chains = 8, # number of independent chains
cores = 8,
threshold = 0.75, # increase threshold from default (0.5)
)
Initializing SMC sampler...
Sampling 8 chains in 8 jobs
/home/twenger/miniforge3/envs/bayes_spec-dev/lib/python3.13/multiprocessing/popen_fork.py:67: RuntimeWarning: os.fork() was called. os.fork() is incompatible with multithreaded code, and JAX is multithreaded, so this will likely lead to a deadlock. self.pid = os.fork()
Adding log-likelihood to trace
[34]:
model.solve()
GMM converged to unique solution
6 of 8 chains appear converged.
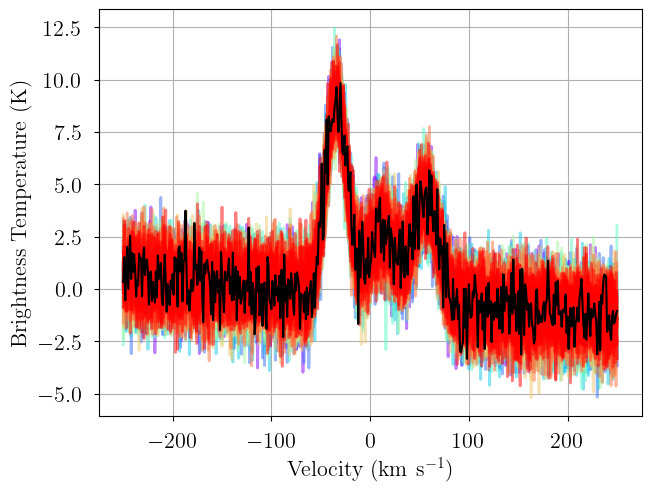
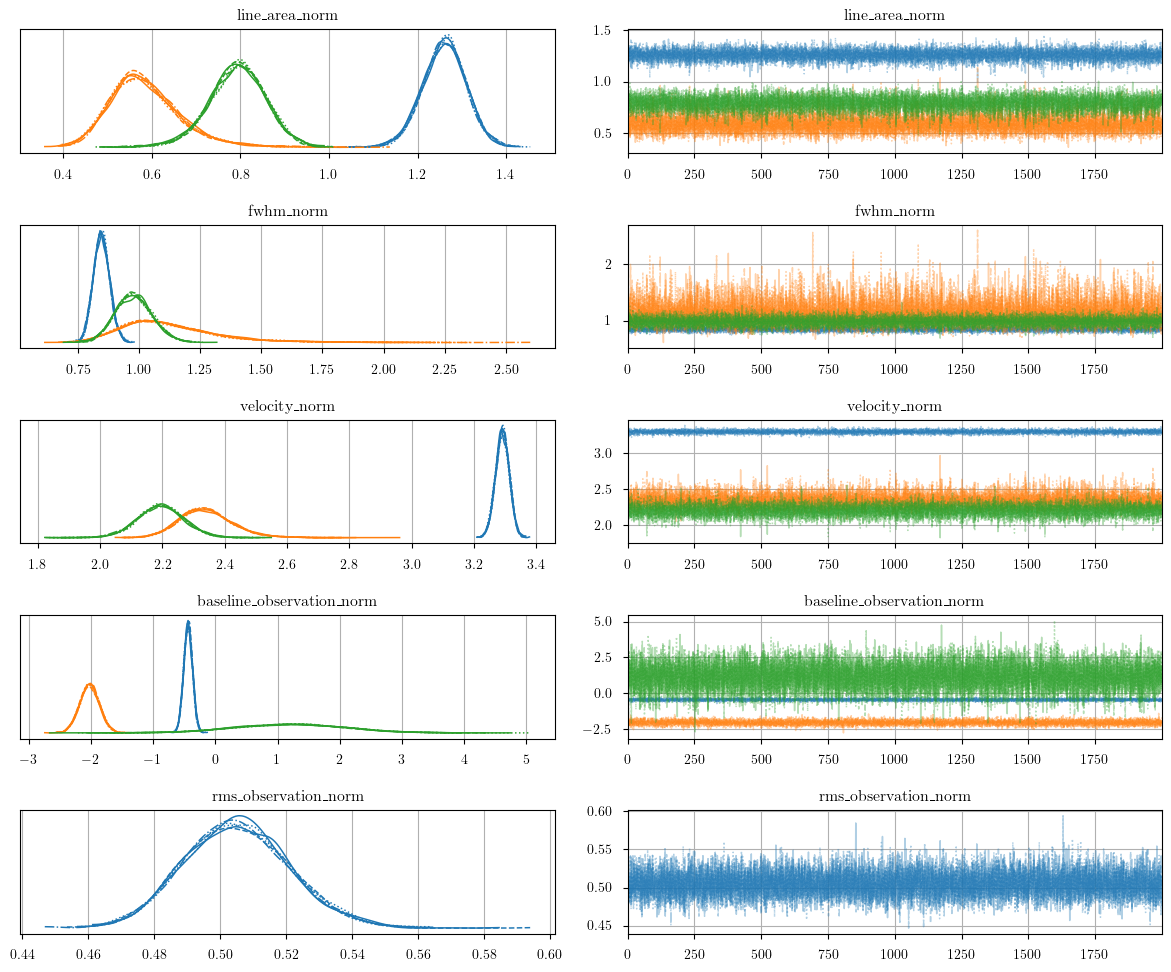
[35]:
posterior = model.sample_posterior_predictive(
thin=100, # keep one in {thin} posterior samples
)
_ = plot_predictive(model.data, posterior.posterior_predictive)
Sampling: [observation]
[36]:
axes = plot_traces(model.trace.solution_0, model.cloud_freeRVs + model.baseline_freeRVs + model.hyper_freeRVs)
fig = axes.ravel()[0].figure
fig.tight_layout()
[37]:
pm.summary(model.trace.solution_0)
[37]:
| mean | sd | hdi_3% | hdi_97% | mcse_mean | mcse_sd | ess_bulk | ess_tail | r_hat | |
|---|---|---|---|---|---|---|---|---|---|
| baseline_observation_norm[0] | -0.439 | 0.070 | -0.574 | -0.312 | 0.001 | 0.000 | 11457.0 | 11516.0 | 1.0 |
| baseline_observation_norm[1] | -2.026 | 0.157 | -2.330 | -1.741 | 0.001 | 0.001 | 12108.0 | 11890.0 | 1.0 |
| baseline_observation_norm[2] | 1.194 | 0.876 | -0.460 | 2.800 | 0.008 | 0.006 | 11403.0 | 11985.0 | 1.0 |
| line_area_norm[0] | 1.260 | 0.049 | 1.167 | 1.350 | 0.000 | 0.000 | 12115.0 | 11970.0 | 1.0 |
| line_area_norm[1] | 0.585 | 0.080 | 0.443 | 0.735 | 0.001 | 0.001 | 12076.0 | 11523.0 | 1.0 |
| line_area_norm[2] | 0.793 | 0.064 | 0.672 | 0.913 | 0.001 | 0.000 | 11979.0 | 11815.0 | 1.0 |
| fwhm_norm[0] | 0.847 | 0.033 | 0.784 | 0.907 | 0.000 | 0.000 | 11839.0 | 11774.0 | 1.0 |
| fwhm_norm[1] | 1.122 | 0.201 | 0.797 | 1.505 | 0.002 | 0.002 | 12146.0 | 10565.0 | 1.0 |
| fwhm_norm[2] | 0.979 | 0.074 | 0.843 | 1.121 | 0.001 | 0.000 | 12095.0 | 11850.0 | 1.0 |
| velocity_norm[0] | 3.292 | 0.022 | 3.251 | 3.332 | 0.000 | 0.000 | 12263.0 | 11860.0 | 1.0 |
| velocity_norm[1] | 2.341 | 0.086 | 2.186 | 2.506 | 0.001 | 0.001 | 11944.0 | 11783.0 | 1.0 |
| velocity_norm[2] | 2.195 | 0.074 | 2.048 | 2.327 | 0.001 | 0.001 | 11946.0 | 11412.0 | 1.0 |
| rms_observation_norm | 0.505 | 0.016 | 0.476 | 0.535 | 0.000 | 0.000 | 12092.0 | 11000.0 | 1.0 |
| line_area[0] | 252.040 | 9.768 | 233.400 | 270.024 | 0.089 | 0.068 | 12115.0 | 11970.0 | 1.0 |
| line_area[1] | 116.944 | 16.004 | 88.675 | 147.037 | 0.146 | 0.140 | 12076.0 | 11523.0 | 1.0 |
| line_area[2] | 158.514 | 12.818 | 134.314 | 182.592 | 0.117 | 0.094 | 11979.0 | 11815.0 | 1.0 |
| fwhm[0] | 25.401 | 0.983 | 23.507 | 27.200 | 0.009 | 0.006 | 11839.0 | 11774.0 | 1.0 |
| fwhm[1] | 33.645 | 6.019 | 23.909 | 45.135 | 0.055 | 0.060 | 12146.0 | 10565.0 | 1.0 |
| fwhm[2] | 29.368 | 2.233 | 25.297 | 33.628 | 0.020 | 0.015 | 12095.0 | 11850.0 | 1.0 |
| velocity[0] | -34.170 | 0.436 | -34.976 | -33.352 | 0.004 | 0.003 | 12263.0 | 11860.0 | 1.0 |
| velocity[1] | 12.659 | 1.672 | 9.667 | 15.872 | 0.015 | 0.014 | 12012.0 | 11934.0 | 1.0 |
| velocity[2] | 56.559 | 1.074 | 54.577 | 58.656 | 0.010 | 0.007 | 11469.0 | 11446.0 | 1.0 |
| amplitude[0] | 9.326 | 0.285 | 8.783 | 9.842 | 0.003 | 0.002 | 11710.0 | 11613.0 | 1.0 |
| amplitude[1] | 3.297 | 0.290 | 2.757 | 3.849 | 0.003 | 0.002 | 11826.0 | 11505.0 | 1.0 |
| amplitude[2] | 5.076 | 0.279 | 4.555 | 5.600 | 0.003 | 0.002 | 11687.0 | 11380.0 | 1.0 |
| rms_observation | 1.010 | 0.032 | 0.951 | 1.071 | 0.000 | 0.000 | 12092.0 | 11000.0 | 1.0 |
[ ]: